Part 6
Source:Bloom Filters by Example · Bloom Filter Calculator Understand exactly how NoSQL databases store, retrieve, and manage data on disk — using the exact examples from the lecture.
📋 Table of Contents
- The Problem: Why SQL’s Approach Breaks for NoSQL
- Brute Force: Flat File Storage
- Write-Ahead Log (WAL)
- In-Memory Hashmap: Key → Offset
- MemTable: Latest Chunk in Memory
- SSTables: Sorted String Tables
- Full Dry Run: Keys 1–5
- LSM Tree: The Full Architecture
- Sparse Index: Memory-Efficient Lookup
- Bloom Filters: Skip Unnecessary Reads
- Tombstones: How Deletion Works
- Full Read & Write Flow
- Summary Cheat Sheet
1. The Problem: Why SQL’s Approach Breaks for NoSQL
SQL: Fixed Schema → Safe In-Place Updates
In SQL, every column has a known data type and every table has a fixed schema. Because the size of every row is exactly known, you can safely update values in-place.
SQL Table: users
Column: id → BIGINT (8 bytes)
Column: name → VARCHAR(50)
Row size = 58 bytes, always.
Row 1: id=20, name="nikl" → 58 bytes exactly
Row 2: id=5, name="nl" → 58 bytes exactly
Update: "nikl" → "nikl abra"
Still fits in VARCHAR(50) → overwrite safely. ✅
Size does not change.
SQL uses B+ Trees internally:
- Every node in the B+ tree is exactly one disk block in size
- Tree height = log(N) → reading/writing = log(N) disk seeks
- Safe because row size is fixed — no overflow risk when updating
NoSQL: Variable-Size Data → In-Place Updates Are Dangerous
In a NoSQL document or key-value store, sizes are completely arbitrary:
Key → any string (variable length)
Value → any string / JSON (variable length)
From the lecture — the exact example:
Disk layout (continuous bytes):
┌──────────────────────────────────────────┬───────────────────────────┐
│ Doc ID=10 │ { "name": "someone" } │ Doc ID=30 │ { "name":"N" }│
│ 4 bytes │ 100 bytes │ 4 bytes │ 80 bytes │
└──────────────────────────────────────────┴───────────────────────────┘
offset=0 offset=104
Update Doc ID=10:
New value: { "name": "someone", "favorite_color": "red" }
New size = 140 bytes > original 100 bytes
Blindly overwriting:
→ Extra 40 bytes bleed into Doc ID=30's space ❌
→ Doc ID=30 data is CORRUPTED
Two bad options when data grows:
https://medium.com/media/f6b7a7703568a660928a2b4968c8a8e3/href“The only safe solution for variable-size data: never update in-place. Just append at the end.” — Instructor
Why disk seeks are so expensive:
Hard Disk Architecture:
┌────────────────────────────────────────┐
│ Read/Write Head (physical arm) │
│ ┌──────────────────┐ │
│ │ Spinning Disk │ ← 6800 RPM│
│ │ ●─────────────► │ │
│ └──────────────────┘ │
│ Track = one ring = sequential data │
└────────────────────────────────────────┘
Sequential read: Disk spins, head stays → FAST ✅
Changing track: Head physically moves → 100ms+ ❌
(This physical movement is called a "disk seek")
Memory Speed Hierarchy (approx):
RAM → 100 ns (baseline)
SSD random → 100 µs (1,000× slower than RAM)
HDD seq. → 1 ms (10,000× slower)
HDD seek → 10 ms (100,000× slower than RAM)
Even for SSDs — sequential I/O is ~100× faster than random I/O. This holds for any memory model.
NoSQL Design Goals:
- Optimise for heavy write loads (SQL writes are slow due to B-tree updates)
- Never corrupt adjacent data when values change size
- Minimise disk seeks (avoid fragmentation)
2. Brute Force: Flat File Storage
Approach: Write key-value pairs sequentially to a flat file — the simplest thing possible.
file.db (flat file on disk, variable-size entries):https://medium.com/media/c0c3dda979d760a8fc3dca16c71c0052/href
──────────────────────────────────────────────────────
key=001 value="V Prasad" ← 100 bytes, offset=0
key=002 value="N" ← 50 bytes, offset=100
key=100 value="Bit" ← 60 bytes, offset=150
key=060 value="Bishujit" ← 40 bytes, offset=210
key=030 value="Shashank" ← 50 bytes, offset=250
──────────────────────────────────────────────────────
Adding Append-Only Writes:
Instead of overwriting, just append a new entry at the end. If key=060 → “Bishujit” needs to become “Shashank”:
file.db (append-only):https://medium.com/media/e13513546d8eb3277fcbc6e325cf9b61/href
key=001 value="V Prasad"
key=002 value="N"
key=100 value="Bit"
key=060 value="Bishujit" ← old entry, still here (stale)
key=030 value="Shashank"
key=060 value="Shashank" ← NEW entry appended at the end ✅
→ To read: scan from BOTTOM TO TOP, first hit = most recent value
3. Write-Ahead Log (WAL)
Every database — especially NoSQL — maintains a Write-Ahead Log (WAL): a purely append-only file on disk that records every change ever made to the database.
WAL File (on disk, append-only):
────────────────────────────────────────────────────
SET key=001 value="V Prasad"
SET key=002 value="N"
SET key=060 value="Bishujit"
SET key=060 value="Shashank" ← update appended, NOT overwritten
DEL key=030
────────────────────────────────────────────────────
← only appends; existing entries NEVER modified
Why WAL Exists
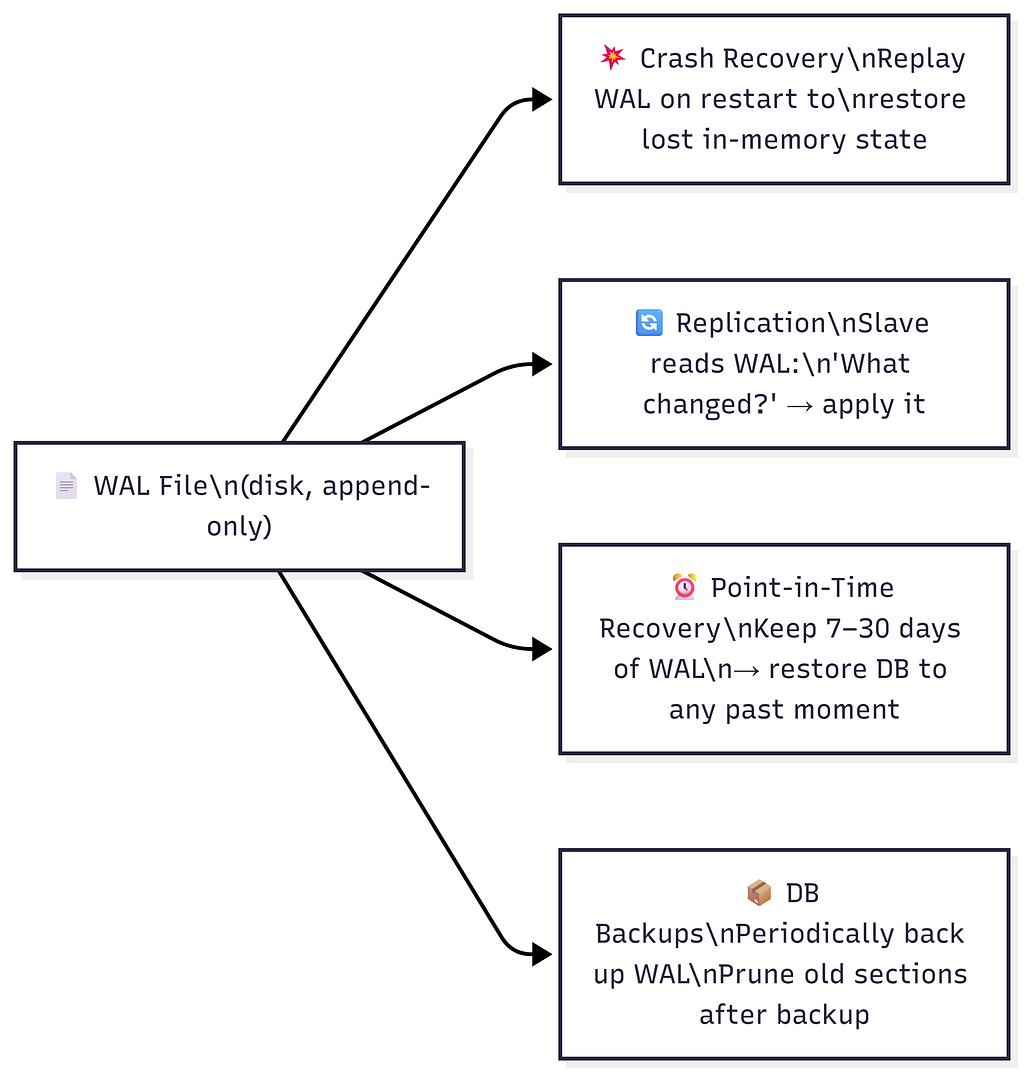
WAL Properties
https://medium.com/media/2904306f6cbe04b0fbeae434cf043224/hrefWAL ≠ Database Snapshot. The database is the current state. The WAL is the full event history of every change that built that state.
4. In-Memory Hashmap: Key → Offset
Problem: Reads are still O(N) — scanning the whole WAL to find a key.
Solution: Maintain an in-memory hashmap mapping every key to its byte offset in the WAL file.
WAL File (on disk) Hashmap (in RAM)
────────────────────────────────── ──────────────────────────────
offset=0: 001 → "V Prasad" 001 → offset 0
offset=100: 002 → "N" 002 → offset 100
offset=150: 100 → "Bit" 100 → offset 150
offset=210: 060 → "Bishujit" 060 → offset 310 ← updated
offset=250: 030 → "Shashank" 030 → offset 250
offset=310: 060 → "Shashank" (latest entry for key=060)
──────────────────────────────────
def read(key):
offset = hashmap[key] # O(1) — pure RAM lookup
buffer = file.read(n, offset) # One disk seek to exact location
key, value = parse(buffer)
return value
def write(key, value):
offset = wl.current_size # End of WAL file
wl.append(key, value) # O(1) — sequential append, no seek
hashmap[key] = offset # O(1) — update RAM hashmap
Why can’t we just overwrite in-place?
WAL has: [060 | "Bishujit" | 40 bytes allocated] [030 | "Shashank"]
Update to: "Shashank" (8 chars, but maybe needs 50 bytes total with metadata)
"Bishujit" slot = 40 bytes. "Shashank" entry needs 50 bytes.
→ Overflow: 10 bytes bleed into "030 | Shashank" ❌
→ Data corruption.
Rule: NEVER overwrite. ALWAYS append.
Performance:
- Writes: O(1) — sequential append + hashmap update
- Reads: O(1) — hashmap lookup + one disk seek
🚨 Big Problem: Hashmap Gets Too Large
1 billion keys × (avg key 50 bytes + offset 8 bytes) ≈ 58 GB hashmap
Typical server RAM: 32–256 GB (shared with everything else)
→ Trillions of keys? Impossible to fit in RAM.
→ Moving hashmap to disk? Makes reads slow again. ❌
“If you have trillions of keys and you put the hashmap on disk — life becomes slow again.” — Instructor
5. MemTable: Latest Chunk in Memory
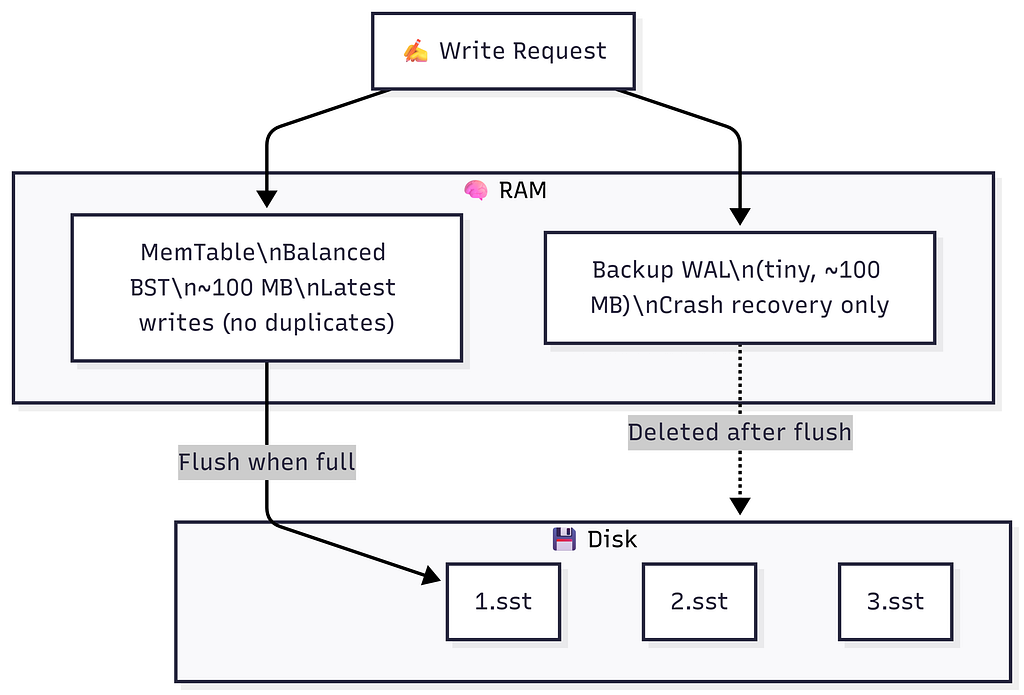
Big Idea: Split the WAL into chunks. Store the latest (current) chunk in memory as a structured buffer — the MemTable.
Why Balanced BST (BBST) — Not a Hashmap?
https://medium.com/media/cc93f6915fdd14860435c9a4abcbff00/hrefMemTable = Balanced Binary Search Tree (Red-Black Tree / AVL Tree / Skip List) in RAM.
MemTable (RAM, BBST):
key=3 (val=Y)
/ \
key=1 (val=W) key=5 (val=C)
\
key=2 (val=X)
In-order traversal → [key=1, key=2, key=3, key=5] ← sorted ✅
Flush to disk → SSTable is automatically sorted ✅
No duplicates → each key appears once ✅
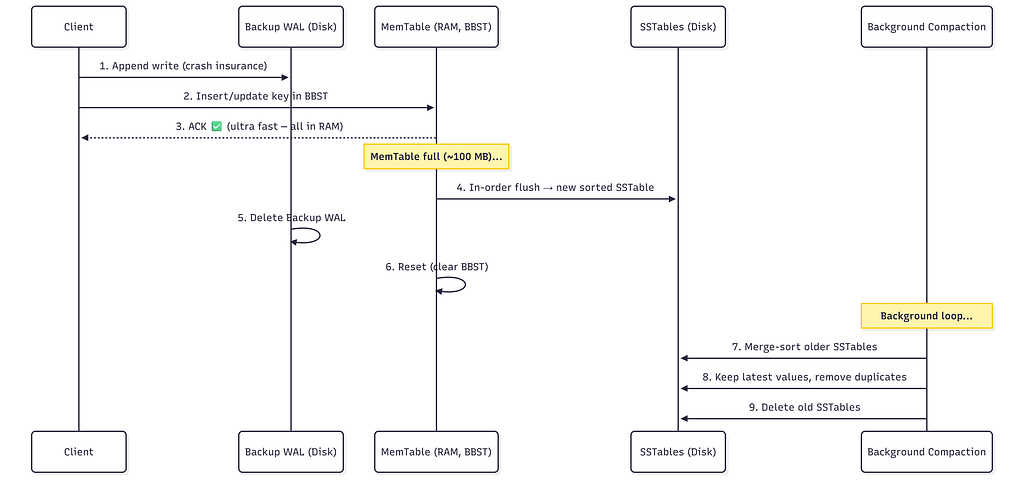
MemTable Write Flow
Write request: SET key=3, value=X
Step 1: Append to Backup WAL on disk (crash recovery insurance)
backup.wal: | ... | SET key=3 value=X |
Step 2: Insert/Update key=3 in the BBST (all in memory)
If key=3 already exists → just update the node. No duplicates.
Step 3: ACK client ✅ (ultra fast — purely in RAM)
MemTable as Read Cache
The MemTable is the hottest read cache in the system.
Read key=3:
① Check MemTable → FOUND (key=3 → X) → return X ✅ (microseconds, zero disk)
Read key=060 (old data, not in MemTable):
① Check MemTable → NOT FOUND
② Must look in SSTables on disk → (covered in Sections 9 & 10)
When MemTable is Full → Flush to SSTable
MemTable FULL (~100 MB reached):
→ Flush in-order traversal → new SSTable file on disk (sorted, immutable)
→ Delete Backup WAL (data safely persisted to disk)
→ Reset (clear) MemTable → begin fresh BBST
→ Start new Backup WAL
Because the MemTable was a BBST, its flush is automatically sorted — no extra sort step needed.
6. SSTables: Sorted String Tables
When the MemTable flushes, it creates an SSTable (Sorted String Table) — an immutable, sorted file on disk.
SSTable File (on disk, immutable):
──────────────────────────────────────────────
key=1 → value=A
key=2 → value=B
key=3 → value=C
──────────────────────────────────────────────
✅ Sorted by key
✅ No duplicates within this one file
✅ Immutable — never modified after creation
✅ Binary search is possible (it's sorted!)
❌ Duplicates CAN exist across different SSTable files
Multiple SSTables Over Time
Disk (after 3 MemTable flushes + current MemTable in RAM):
1.wl: [key=1→A, key=2→B, key=3→C] ← oldest flush
2.wl: [key=1→X, key=2→W, key=4→D, key=5→C] ← second flush
3.wl: [key=1→Y, key=2→W, key=3→X] ← newest flush
MemTable (RAM): { key=2→X, key=3→Y, key=1→W } ← latest in-memory
Key=1 appears in ALL four places → most recent wins.
Background Compaction (Merge Sort)
A background process periodically merges older SSTables:

Merge logic (keep latest value for duplicates):
key=1: in both 1.wl(→A) and 2.wl(→X) → keep 2.wl (newer) → 1→X
key=2: only in 1.wl → 2→B (wait, 2→W from 2.wl)
key=3: only in 1.wl → 3→C
key=4: only in 2.wl → 4→D
key=5: only in 2.wl → 5→C
XL1.sst: [key=1→X, key=2→W, key=3→C, key=4→D, key=5→C]
Delete 1.wl and 2.wl. ✅
⚠️ Tuning Compaction is Critical in Production. When deploying Cassandra or any LSM-based store, poorly tuned compaction directly hurts read and write performance. Tune: chunk size, compaction frequency, run during lowest traffic (e.g., 3 AM).
7. Full Dry Run: Keys 1–5
This is the exact step-by-step dry run from the lecture. Chunk size = 3.
Initial State (disk + RAM):
Disk (SSTables):https://medium.com/media/6615756dfb1d5846c1976a4dca23c1b8/href
1.wl: [1→A, 2→B, 3→C] ← oldest
2.wl: [1→X, 4→D, 5→C] ← second
3.wl: [1→Y, 2→W, 3→X] ← newest
MemTable (RAM, BBST): empty
Backup WAL (disk): empty
Hashmap (RAM):
key=1 → "3.wl" (latest for key=1)
key=2 → "3.wl"
key=3 → "3.wl"
key=4 → "2.wl"
key=5 → "2.wl"
MemTable Full → Flush:
In-order traversal of BBST: [1→W, 2→X, 3→Y] ← sorted automatically ✅
Flush to disk as 4.wl: [key=1→W, key=2→X, key=3→Y]
Update Hashmap:
key=1 → "4.wl" (was "3.wl")
key=2 → "4.wl" (was "3.wl")
key=3 → "4.wl" (was "3.wl")
key=4 → "2.wl" (unchanged)
key=5 → "2.wl" (unchanged)
Clear MemTable → empty BBST. Delete Backup WAL.
Background Compaction: 1.wl + 2.wl + 3.wl → XL1.sst:
Merge-sort all three SSTables, keep latest per key:
key=1: in 1.wl(→A), 2.wl(→X), 3.wl(→Y) → latest is 3.wl → 1→Y
key=2: in 1.wl(→B), 3.wl(→W) → latest is 3.wl → 2→W
key=3: in 1.wl(→C), 3.wl(→X) → latest is 3.wl → 3→X
key=4: only in 2.wl → 4→D
key=5: only in 2.wl → 5→C
XL1.sst: [1→Y, 2→W, 3→X, 4→D, 5→C]
Delete 1.wl, 2.wl, 3.wl.
Final disk state:
XL1.sst: [1→Y, 2→W, 3→X, 4→D, 5→C] ← compacted (older)
4.wl: [1→W, 2→X, 3→Y] ← newest flush
8. LSM Tree: The Full Architecture
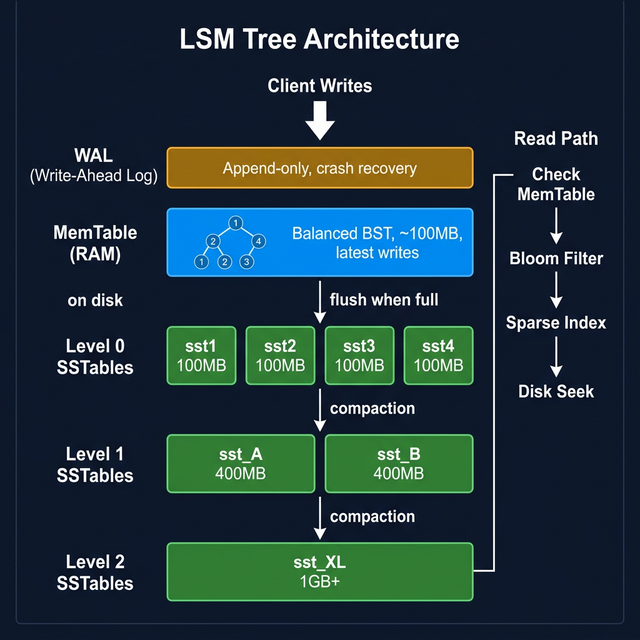
Multiple levels of SSTables form a Log-Structured Merge Tree (LSM Tree):
┌──────────────────────────────────┐
│ MemTable (RAM, BBST) │ ← ALL writes go here
│ ~100 MB, no duplicates │
└─────────────────┬────────────────┘
│ flush when full
┌─────────────────▼────────────────┐
Level 0 │ sst1 sst2 sst3 sst4 │ ← small, ~100 MB each
(disk) │ sorted, may have overlapping keys│
└─────────────────┬────────────────┘
│ compaction (merge sort)
┌─────────────────▼────────────────┐
Level 1 │ sst_A sst_B │ ← larger, ~200–500 MB
(disk) │ sorted, non-overlapping keys │
└─────────────────┬────────────────┘
│ compaction
┌─────────────────▼────────────────┐
Level 2 │ sst_XL │ ← 1 GB+, fully merged
(disk) │ no duplicates at all │
└──────────────────────────────────┘
WAL (disk, separate):
│ Crash recovery only │
│ Deleted after each MemTable flush │
Complexity:
https://medium.com/media/28e5c12ff080dd01fbfb43f41debc599/href“The number of SS tables is kept small by the compaction process — it’s order log(N).” — Instructor
9. Sparse Index: Memory-Efficient Lookup
Problem: The hashmap of key → SSTable name has one entry per key. Billions of keys = hashmap too big for RAM.
Solution: For each SSTable, maintain a Sparse Index in memory — store only the first key of every 64 KB block.
Building the Sparse Index
SSTable on disk (1 GB, sorted):
Block 0 (offset=0, 64 KB): key=0 ... key=100
Block 1 (offset=65536, 64 KB): key=101 ... key=2010
Block 2 (offset=131072, 64 KB): key=2011 ... key=5000
...
Block 16383 (last, 64 KB): key=... ... key=N
Sparse Index (stored in RAM — one entry per block):
┌─────────────────────────────────────────┐
│ key=0 → offset 0 │
│ key=101 → offset 65,536 │
│ key=2011 → offset 131,072 │
│ ... │
└─────────────────────────────────────────┘
Total blocks = 1 GB / 64 KB = 2^14 ≈ 16,000
Average key size = 64 bytes
Sparse Index size = 16,000 × 64 bytes ≈ 1 MB
vs. full key index for 10M keys → hundreds of MB
→ 1000× reduction in index memory! 🎉
“If this SS table is 1 GB, this sparse index is only 1 MB — a 1000x reduction!” — Instructor
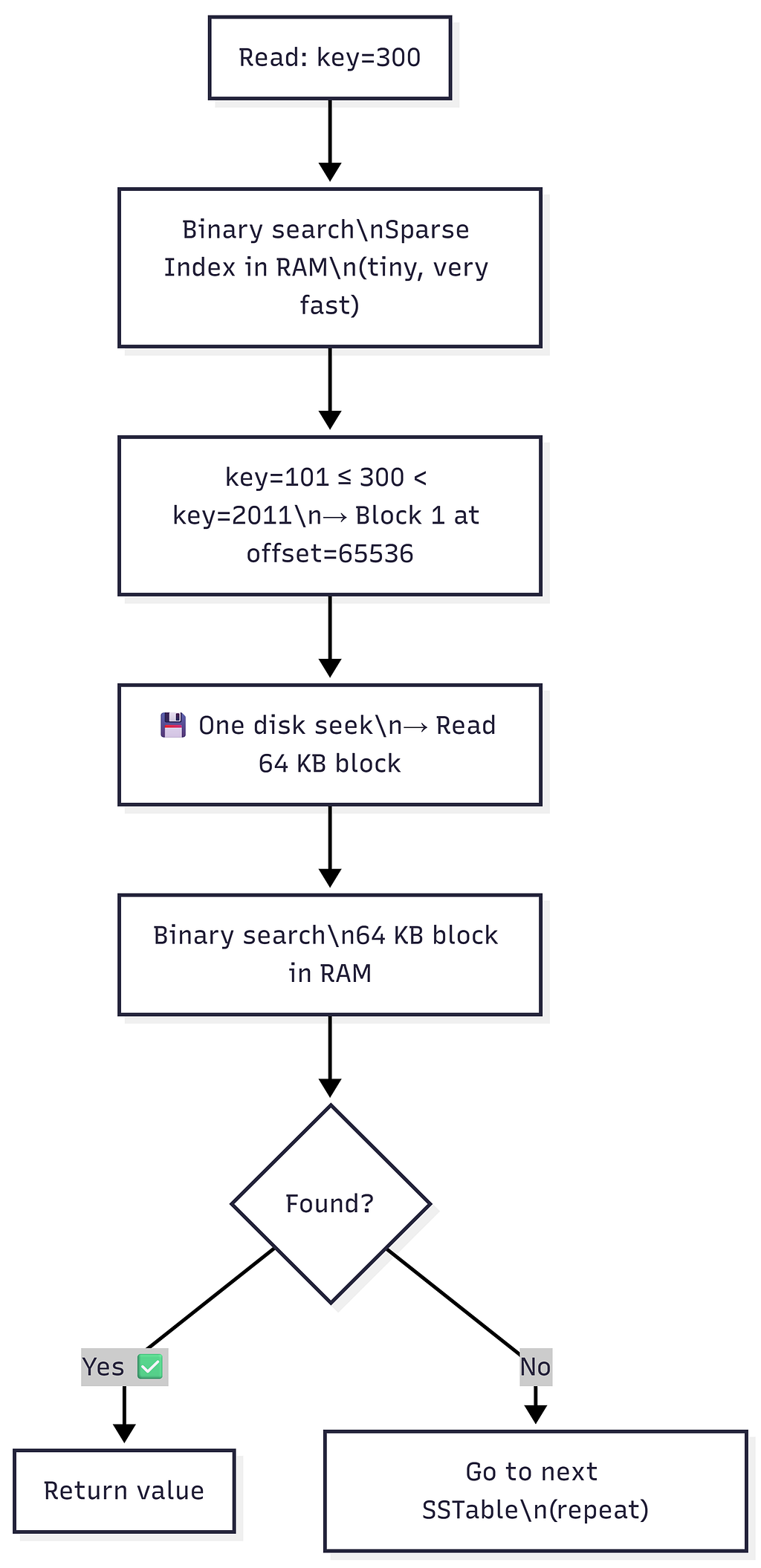
Reading with Sparse Index (2-Step Binary Search)
Example: Read key=300
Step 1: Binary search the Sparse Index (purely in RAM):
Entries: key=0(offset=0), key=101(offset=65536), key=2011(offset=131072)
key=101 ≤ 300 < key=2011
→ key=300 must be in Block 1, starting at offset=65536
Step 2: One disk seek to offset=65536 → read 64 KB block into RAM
Step 3: Binary search within the 64 KB block (in RAM):
Block 1: [key=101, key=150, key=200, key=300, key=400...]
→ Found: key=300 → return value ✅
Cost: 1 disk seek per SSTable checked.
“64 KB is exactly the size of one track on a spinning disk — so reading a 64 KB block = exactly one disk seek. As efficient as it gets.”
10. Bloom Filters: Skip Unnecessary Reads
Problem: When a key doesn’t exist anywhere, we still check every SSTable’s sparse index and do a disk seek per SSTable — only to find nothing.
Solution: A Bloom Filter — a probabilistic, fixed-size bit array that tells you whether a key was ever inserted.
Bloom Filter — Core Idea
“A Bloom filter is a data structure designed to tell you, rapidly and memory-efficiently, whether an element is present in a set.” — Bloom Filters by Example
Two operations only:
- insert(key) — mark this key as present
- contains(key) → TRUE (maybe present) or FALSE (definitely absent)
Guarantees:
If key IS present → ALWAYS returns TRUE (zero false negatives) ✅
If key IS NOT present → returns FALSE (usually) ✅
tiny chance of TRUE (false positive) ⚠️
→ tunable rate (e.g., 1%)
Size NEVER grows regardless of how many keys are inserted. ← The Magic!
“In case of a set or hashmap, as you insert more data, the size will grow. In case of a bloom filter, the size does not change at all. That is magic.” — Instructor
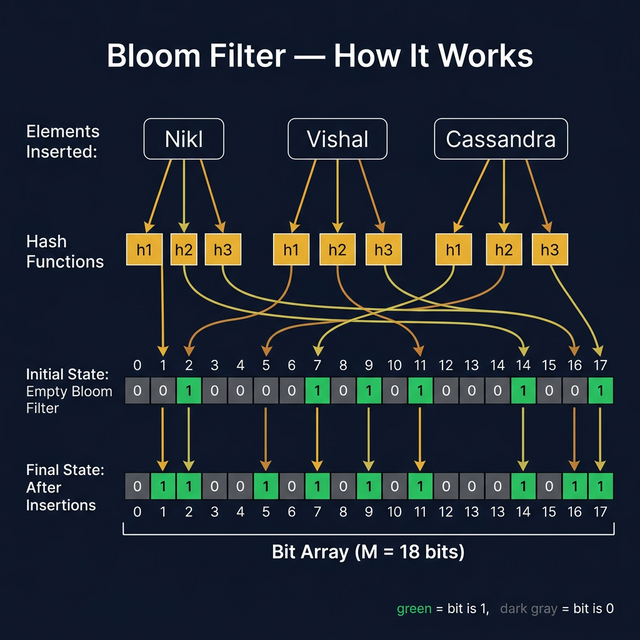
How a Bloom Filter Works — The Exact Lecture Example
Setup:
Bloom Filter = bit array of size M=12, all zeros:
Index: 0 1 2 3 4 5 6 7 8 9 10 11
┌───┬───┬───┬───┬───┬───┬───┬───┬───┬───┬───┬───┐
Bits: │ 0 │ 0 │ 0 │ 0 │ 0 │ 0 │ 0 │ 0 │ 0 │ 0 │ 0 │ 0 │
└───┴───┴───┴───┴───┴───┴───┴───┴───┴───┴───┴───┘
K = 3 hash functions: h1, h2, h3
INSERT “Nikl” — pass through all 3 hash functions, set those bits:
h1("Nikl") = 2 → bit[2] = 1
h2("Nikl") = 3 → bit[3] = 1
h3("Nikl") = 9 → bit[9] = 1Index: 0 1 2 3 4 5 6 7 8 9 10 11
┌───┬───┬───┬───┬───┬───┬───┬───┬───┬───┬───┬───┐
Bits: │ 0 │ 0 │ 1 │ 1 │ 0 │ 0 │ 0 │ 0 │ 0 │ 1 │ 0 │ 0 │
└───┴───┴───┴───┴───┴───┴───┴───┴───┴───┴───┴───┘
↑ ↑ ↑
"Nikl" bits
Did the size of the filter change? ❌ No. Still M=12 bits.
INSERT “Vishal”:
h1("Vishal") = 2 → bit[2] already 1 (no change)
h2("Vishal") = 5 → bit[5] = 1
h3("Vishal") = 11 → bit[11] = 1
Index: 0 1 2 3 4 5 6 7 8 9 10 11
┌───┬───┬───┬───┬───┬───┬───┬───┬───┬───┬───┬───┐
Bits: │ 0 │ 0 │ 1 │ 1 │ 0 │ 1 │ 0 │ 0 │ 0 │ 1 │ 0 │ 1 │
└───┴───┴───┴───┴───┴───┴───┴───┴───┴───┴───┴───┘CHECK “V Prasad” (never inserted) — hash → {1, 3, 7}:
bit[1] = 0 ← STOP! Any zero bit = DEFINITE NO ✅
→ "V Prasad" is NOT in this SSTable.
→ Skip this SSTable — no disk seek needed! 🎉
CHECK “Abhishek” (never inserted) — hash → {3, 9, 11}:
bit[3] = 1 ✓
bit[9] = 1 ✓
bit[11] = 1 ✓ ← all bits are 1!
→ Bloom Filter says: "MAYBE EXISTS" ⚠️
→ Must search the SSTable on disk
→ Not found → FALSE POSITIVE (rare, tunable)
False Positive Formula
From llimllib.github.io/bloomfilter-tutorial:
P(false positive) ≈ (1 - e^(-k·n/m))^k
Variables:
k = number of hash functions
n = number of keys inserted into the filter
m = number of bits in the filter (= M)
Optimal number of hash functions:
k_optimal = (m/n) × ln(2) ← choose this k for minimum false positives
From the lecture’s calculator demo (hur.st/bloomfilter):
n = 1,000,000,000 (1 billion keys)
p = 0.01 (1% false positive rate — target)
k = 7 (optimal hash functions)
m = 1 GB (filter size in bits)
→ False positive rate ≈ 1% ✅
vs. storing 1 billion keys in a hashmap:
1 billion × 100 bytes/key = 100 GB ← won't fit in RAM ❌
Bloom filter: just 1 GB ← trivially fits ✅
Space savings: ~100× 🎉
Choosing the Right Filter Size (from the Tutorial)
To configure a Bloom filter for your application:
- Choose n — estimate how many keys you'll insert
- Choose m — pick a bit-array size you can afford in memory
- Calculate optimal k = (m/n) × ln(2)
- Calculate false positive rate = (1 - e^(-k·n/m))^k
- If false positive rate is too high → increase m and repeat
Key insight: A larger filter = fewer false positives. Time complexity: O(k) for both insert and lookup — always constant regardless of how many elements are stored.
Real-World Use Cases
1. CDN (Akamai / Cloudflare) — from the lecture:
Fact: 70% of URLs on the internet are visited only ONCE.
CDNs cache a URL only after it has been visited TWICE.
Problem:
Store all seen URLs to detect second-visit:
Trillion URLs × 500 bytes/URL = 500 TB hashmap ❌
Solution with Bloom Filter:
First visit → insert URL into Bloom Filter (don't cache yet)
Second visit → Bloom Filter says "seen before" → cache it ✅
Filter size: a few GB (vs 500 TB) — 100,000× smaller!
2. Other real-world uses (from resources):
https://medium.com/media/1dace6949d334314cd43d539ed5b9684/href3. Real databases using Bloom Filters (from tutorial):
- ScyllaDB — uses MurmurHash for bloom filters
- RocksDB — built-in bloom filter per SSTable
- Apache Spark — BloomFilterImpl
- SQLite — used internally for query optimization
- Chromium browser — detects malicious URLs
- InfluxDB — for time-series data lookups
11. Tombstones: How Deletion Works
Problem:
- SSTables are immutable — you can’t remove an entry from them
- Bloom Filters never forget — once bits are set, they cannot be unset
Solution: Tombstones — a special sentinel value meaning “this key has been deleted.”
Deletion = Write a Tombstone
DELETE key=060
Step 1: Write tombstone to MemTable:
MemTable: key=060 → TOMBSTONE (a special marker value)
Step 2: Tombstone flushes to SSTable just like any normal value:
sst_X: [..., key=060 → TOMBSTONE, ...]
Step 3: On any future read for key=060:
Value = TOMBSTONE → return "key not found" to client
Why Not Just Delete From the Bloom Filter?
Bloom Filter: NO delete operation exists.
"Bloom filter never forgets." — Instructor
When key=060 was first written → some bits (e.g., 3, 9, 11) were set.
Even after the key is deleted:
→ Those bits stay 1.
→ Bloom Filter will ALWAYS say "key=060 maybe exists".
Without a tombstone:
Every read for deleted key=060:
① Bloom filter: "maybe"
② Scan ALL SSTables (waste of disk I/O!) ← bad ❌
With a tombstone:
Every read for deleted key=060:
① Bloom filter: "maybe"
② Seek into newest SSTable
③ Find TOMBSTONE immediately
④ Return "not found" — no need to check older SSTables ✅
Tombstone During Compaction

12. Full Read & Write Flow
Write Flow
Read Flow

Performance Summary
https://medium.com/media/7d45a4d728a848c3551270e7c0241391/href13. Summary Cheat Sheet
┌──────────────────────────────────────────────────────────────────────────┐
│ NoSQL Internals — LSM Tree Architecture at a Glance │
├──────────────────────┬───────────────────────────────────────────────────┤
│ Component │ Summary │
├──────────────────────┼───────────────────────────────────────────────────┤
│ WAL │ Append-only log on disk. Crash recovery, │
│ (Write-Ahead Log) │ replication, point-in-time recovery. │
│ │ Immutable. Deleted after each MemTable flush. │
├──────────────────────┼───────────────────────────────────────────────────┤
│ MemTable │ BBST in RAM. Absorbs ALL writes. Acts as read │
│ │ cache. No duplicates. In-order dump = sorted. │
│ │ Flushed to SSTable when full (~100 MB). │
├──────────────────────┼───────────────────────────────────────────────────┤
│ SSTable │ Sorted String Table. Immutable sorted file on │
│ (Sorted String Table)│ disk. No duplicates within one file. Created │
│ │ from MemTable flush. Never appended to again. │
├──────────────────────┼───────────────────────────────────────────────────┤
│ LSM Tree │ Multi-level hierarchy of SSTables. Small at top, │
│ (Log-Structured │ large merged files at bottom. Compaction keeps │
│ Merge Tree) │ SSTable count at O(log N). │
├──────────────────────┼───────────────────────────────────────────────────┤
│ Compaction │ Background merge of SSTables via merge sort. │
│ │ Keeps latest value per key. Removes duplicates. │
│ │ Critical to tune in production (timing, size). │
├──────────────────────┼───────────────────────────────────────────────────┤
│ Sparse Index │ Per-SSTable in-memory index. One entry per 64 KB │
│ │ block. 1 GB SSTable → 1 MB index (1000× smaller).│
│ │ Enables 2-step binary search into SSTables. │
├──────────────────────┼───────────────────────────────────────────────────┤
│ Bloom Filter │ Fixed-size bit array (M bits, K hash functions). │
│ │ Zero false negatives. Tunable false positive rate. │
│ │ 1B keys → 1 GB filter at 1% FP. Size never grows.│
│ │ Time: O(k) for insert/lookup. Real DBs: RocksDB, │
│ │ Cassandra, ScyllaDB, SQLite, Chromium, Spark. │
├──────────────────────┼───────────────────────────────────────────────────┤
│ Tombstone │ Special delete marker value. │
│ │ DELETE key → write(key, TOMBSTONE). │
│ │ Needed because: SSTable is immutable + │
│ │ Bloom Filter never forgets. │
│ │ Physically removed during later compaction. │
└──────────────────────┴──────────────────────────────────────────────────┘
Databases That Use LSM Trees
https://medium.com/media/d1b9aff5957bfe35d616e00aeefe80cc/href📚 Related Topics:
* SQL vs NoSQL Ultimate Guide
* External Resources:
-> Bloom Filters by Example — interactive tutorial
-> Bloom Filter Calculator — tune n, m, k, p
* Wikipedia — Bloom Filter — comprehensive reference
* Assignment from this class: Bloom Filter implementation
* Next class: Case Study — Designing a Messaging App
Notes based on from: llimllib.github.io/bloomfilter-tutorial and hur.st/bloomfilter
🌳 NoSQL Internals: LSM Trees, WAL & Bloom Filters was originally published in Level Up Coding on Medium, where people are continuing the conversation by highlighting and responding to this story.